Alex construye un motor Vespa Quattrini 252ccm 4 - etapa 2 con prueba de escape
En la cuarta parte de nuestra pequeña serie de blogs hagamos los siguientes cambios en nuestro motor de prueba:
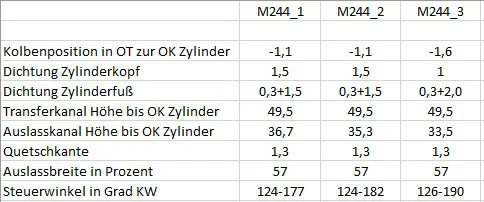
El cilindro está al pie con dos 1 mm. Espaciadores Elevado 2 mm más en comparación con la etapa de construcción 0.5. Esto cambia el ángulo de control de los canales de transferencia de 124 ° a 126 °. La salida está fresada para ajustarla a un ángulo de control de 190 °. Para ello, la salida del cilindro se elevó 1.8 mm. El ancho de salida permanece sin cambios en 57%.
![]()
Los primeros intentos se hacen con el Elron.
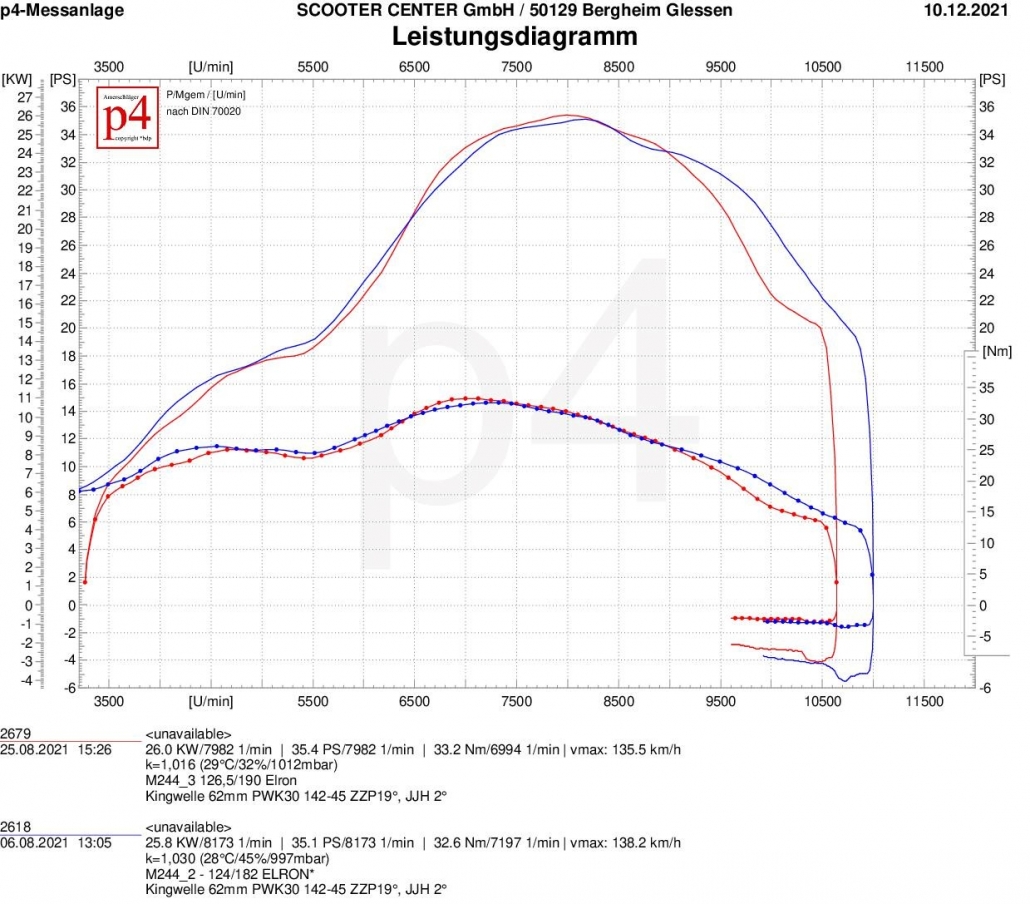
Los sistemas de escape algo nerviosos mostrarían un cambio claro en la dirección del rendimiento con los cambios realizados, pero el Elron casi no está impresionado por las especificaciones del cilindro y conserva el control sobre las características del motor. Un ligero aumento en los valores máximos después del punto decimal solo indica que Elron ha notado que el cilindro está enviando una señal más clara a través del escape. Sin embargo, el par máximo permanece al mismo nivel que en la primera etapa de construcción.
El rango de velocidad disponible se reduce de 500 rpm a 3540 rpm.
Caja Polini
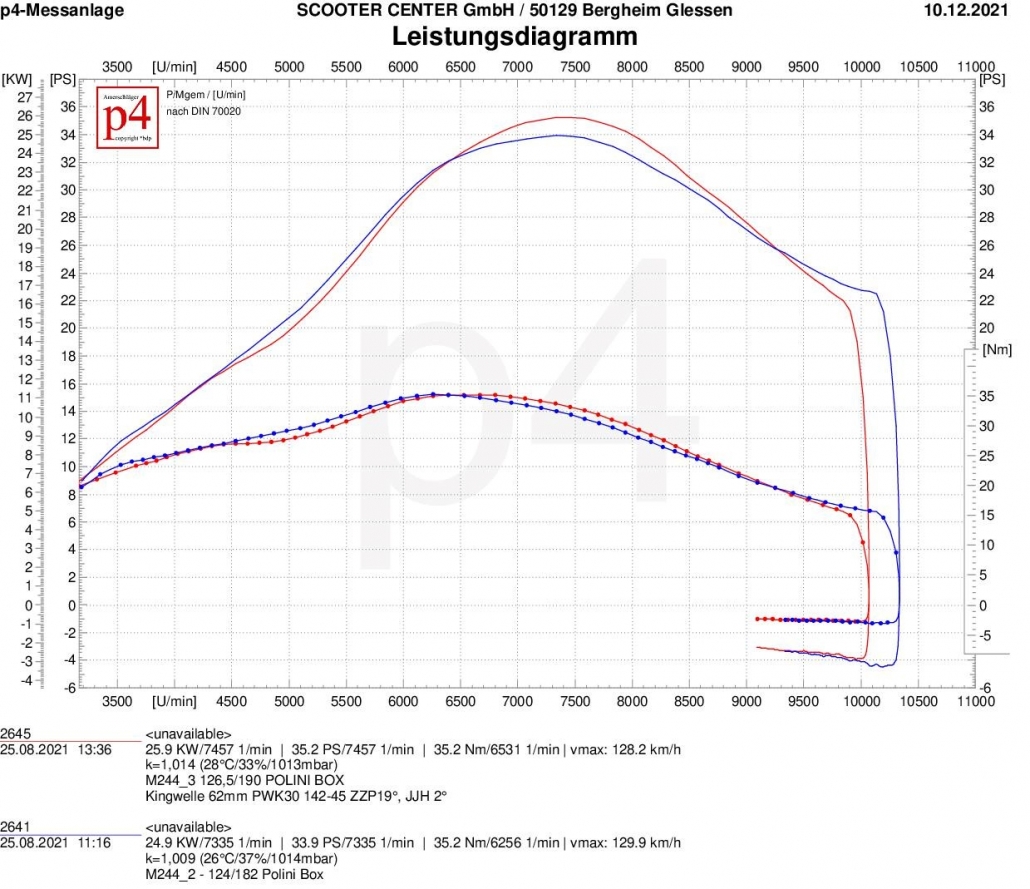
Como escape de caja, el sistema de escape Polini reacciona como se esperaba. Al igual que el Elron, la lata de Italia solo muestra pequeñas reacciones. La compresión efectiva más baja hace que la curva baje un poco en el aumento entre 4000 rpm y 6200 rpm. El sistema implementa la sección transversal de tiempo ligeramente aumentada en la ventana de salida con una ganancia de poco más de un caballo de fuerza en su punto máximo.
El par máximo sigue siendo el mismo a 35.2 Nm y solo cambia unos pocos cientos de revoluciones en la dirección de velocidades más altas.
Con un ancho de banda de 3800 revoluciones, el sistema Polini está ligeramente por detrás de la posición 2, pero este experimento muestra que la caja no necesariamente prefiere los ángulos de control muy pequeños. En comparación directa con la etapa de construcción 1, el ancho de banda y los valores máximos han aumentado significativamente.
Rendimiento de la mano izquierda JL / JL
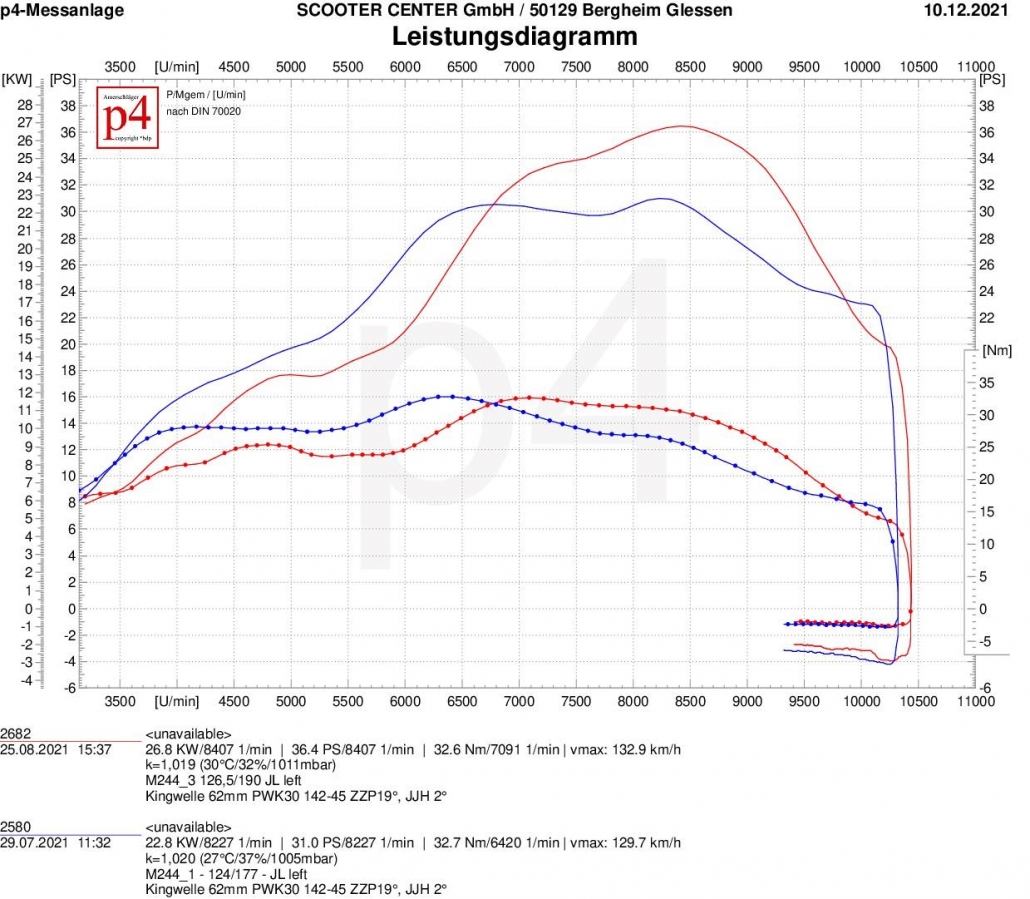
Nuestro sujeto de prueba tuvo un breve descanso en la fase de construcción anterior, debido a citas fuera de casa; pero ahora vuelve a jugar en la tercera etapa de construcción. Por lo tanto, aquí está la comparación entre los niveles 1 y 2.
De modo que también queda muy claro cuán claramente puede comportarse un escape cuando se opera desde otros ángulos de control. JL, a quien se considera bondadoso, resulta ser un socio muy accesible en busca de rendimiento.
En la parte superior, el JL proporciona casi cinco caballos y medio más y supera la línea de 36 CV en el gráfico. El par se mantiene en 32.6 Nm al mismo nivel que en el primer intento. Sin embargo, el par se extiende a un rango mucho más amplio, más allá de las 7000 rpm. El pico de rendimiento se alcanza con 36.4 CV a 8400 rpm. El JL solo cae por debajo de la línea de 25PS considerada en el ancho de banda más allá de 9600rpm y, por lo tanto, no puede describirse como una velocidad lenta. En general, el gráfico cambia significativamente en la dirección de velocidades más altas. Con un ancho de banda de solo 3400 revoluciones, el JL incluso se queda atrás del Elron y ocupa la parte trasera en términos de ancho de banda en esta etapa de construcción.
Scooter y servicio Newline
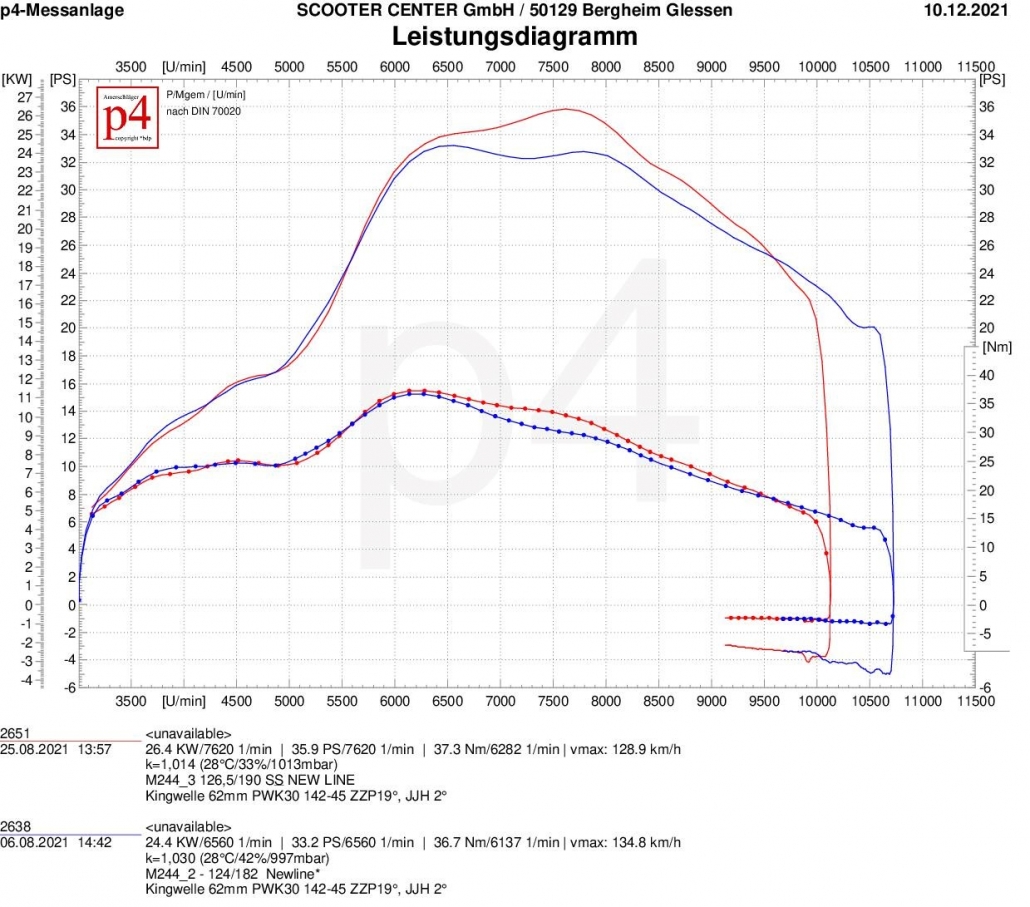
El hombre de poder angular del norte se siente como en casa en esta etapa de expansión y se lleva dos notas máximas con él.
No hay cambios notables en el aumento en la nueva línea, pero sí bastante debido al mayor ángulo de avance en el rango de velocidad del motor. Con 37.3 Nm, ocupa la primera posición en términos de par en la tercera etapa de construcción. El rango de velocidad disponible es más estrecho en comparación con las pruebas anteriores, pero aquí también el Newline alcanza un rango de 4000 revoluciones. Con estos valores, las consideraciones germinan después de una primaria más larga con 24-60 ...
Nessie
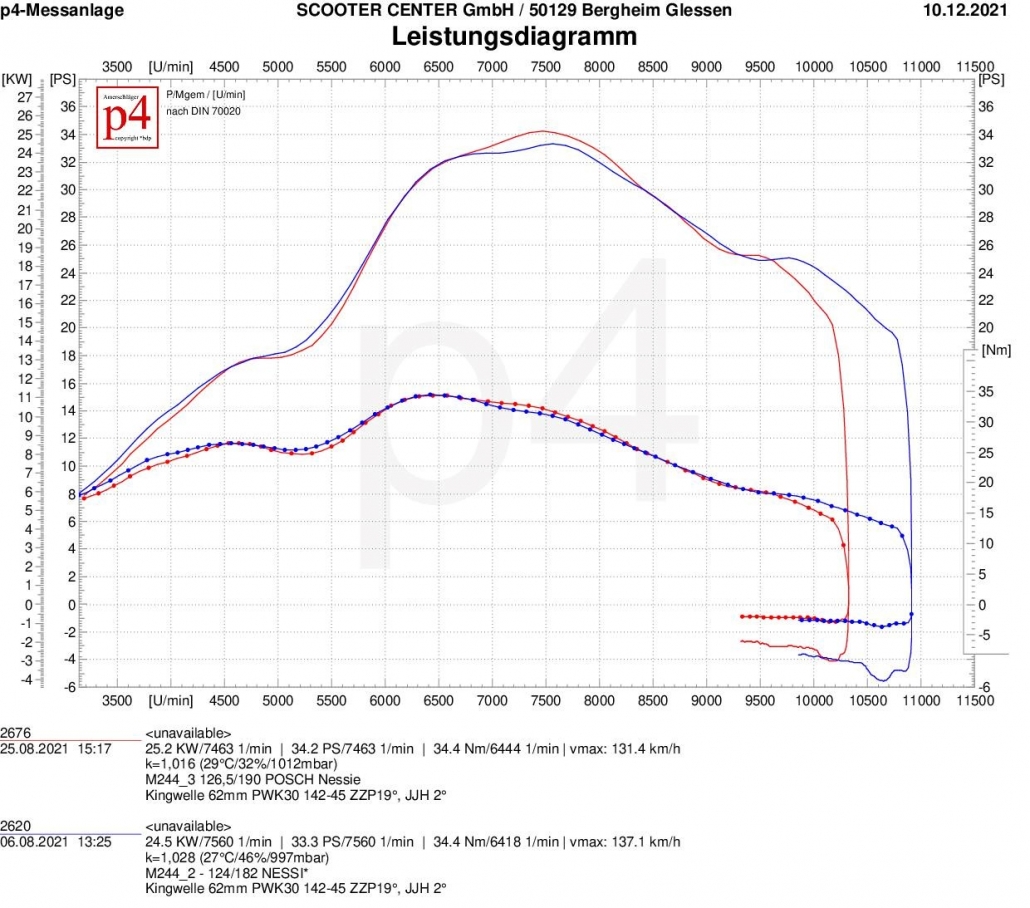
Similar al Elron, el Seemonster de Posch Performance no está muy seguro de qué hacer con el ángulo de dirección cambiado. El par máximo sigue siendo el mismo y la potencia máxima aumenta en un caballo de fuerza. Mientras que el Nessie estaba muy por delante en el nivel 1 con 4300 revoluciones en el ancho de banda, el rango de revoluciones disponible en el nivel tres va un poco a la estación de buceo y está en el mediocampo superior con 3700 revoluciones.
Resiliencia de carreras
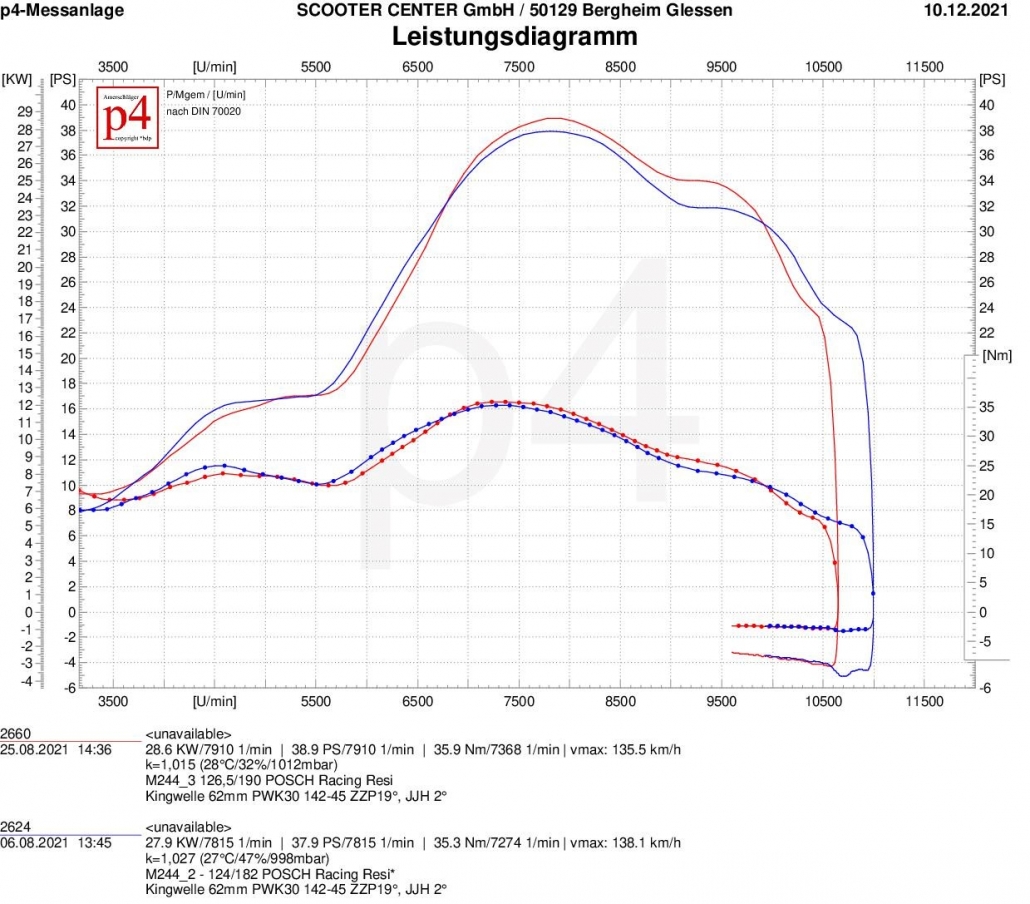
Racing Resi prueba mejor los cambios. Más bien unido a los ángulos de control más altos, el Resi desarrolla un caballo de fuerza más en la parte superior y agrega torque, lo que apenas afecta el ancho de banda en la línea de 25PS. En términos absolutos, el Resi ocupa la posición de rendimiento máximo más alto en este nivel con 38.9 CV. Nos acercamos poco a poco a la marca de 40 CV con las etapas de expansión.
Lakers
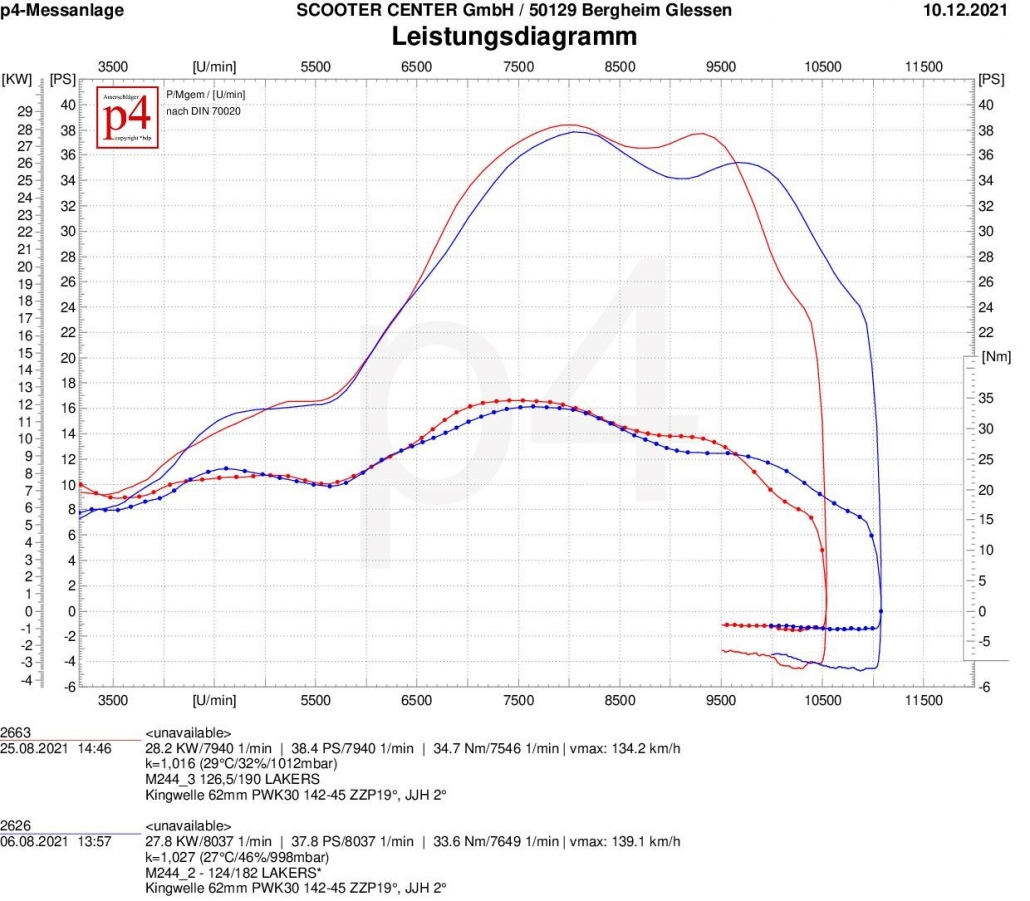
Con 126 ° a 190 °, los Lakers aún no están en su zona de confort. Aunque también convierte claramente el ángulo de control modificado en rendimiento. Con 38.4PS en la parte superior, está solo detrás del Resi. Con un rango de velocidad de 3700 revoluciones, que ahora se extiende a 10.100 rpm, los Lakers muestran a dónde puede llegar el viaje con los periféricos adecuados.
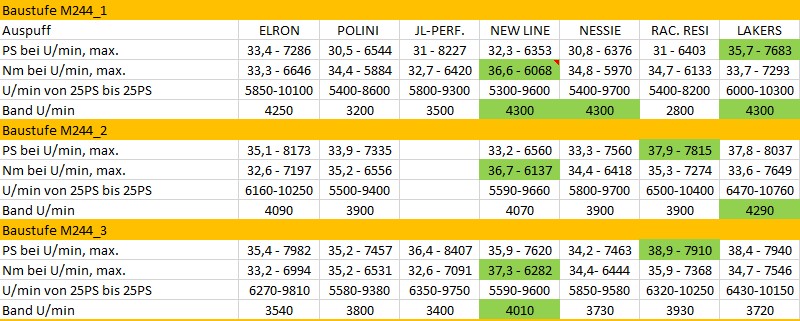
Aquí, en el resumen, los resultados. Los mejores valores están resaltados en verde.






 -vespa-cilindro-pinasco-225-super-sport")




